محققان با استفاده از اوریگامی DNA نانورباتی ساختند که میتواند با دقت پیکونیوتون فشار وارد شدن بر سلول را بررسی کند.
سلولهای ما در معرض نیروهای مکانیکی اعمال شده در مقیاس میکروسکوپی هستند و سیگنالهای زیستی ضروری برای بسیاری از فرآیندهای سلولی درگیر در عملکرد طبیعی بدن ما یا در ایجاد بیماریها را تحریک میکنند. برای مثال، احساس لامسه تا حدی مشروط به اعمال نیروهای مکانیکی بر گیرندههای سلولی خاص است. علاوه بر لمس، این گیرندهها که به نیروهای مکانیکی حساس هستند (مکانوگیرندهها) میتوانند سایر فرآیندهای زیستی کلیدی مانند انقباض عروق خونی، درک درد، تنفس یا حتی تشخیص امواج صوتی در گوش و غیره را تنظیم کنند.
اختلال عملکرد این حساسیت مکانیکی سلولی در بسیاری از بیماریها دخیل است. به عنوان مثال در سرطان، سلولهای سرطانی دائماً با خواص مکانیکی ریزمحیط خود سازگار میشوند. چنین سازگاری تنها به این دلیل امکانپذیر است که نیروهای خاصی توسط گیرندههای مکانیکی که اطلاعات را به اسکلت سلولی منتقل میکنند، شناسایی میشوند.
در حال حاضر، دانش ما از این مکانیسمهای مولکولی درگیر در حساسیت مکانیکی سلول بسیار محدود است. چندین فناوری برای اعمال نیروهای کنترل شده و مطالعه این مکانیسمها در دسترس هستند، اما محدودیتهایی دارند. به ویژه، این که این فناوریها بسیار پرهزینه هستند و به ما اجازه نمیدهند چندین گیرنده سلولی را در یک زمان مطالعه کنیم. اگر بخواهیم دادههای زیادی را جمعآوری کنیم، استفاده از آنها بسیار زمانبر است.
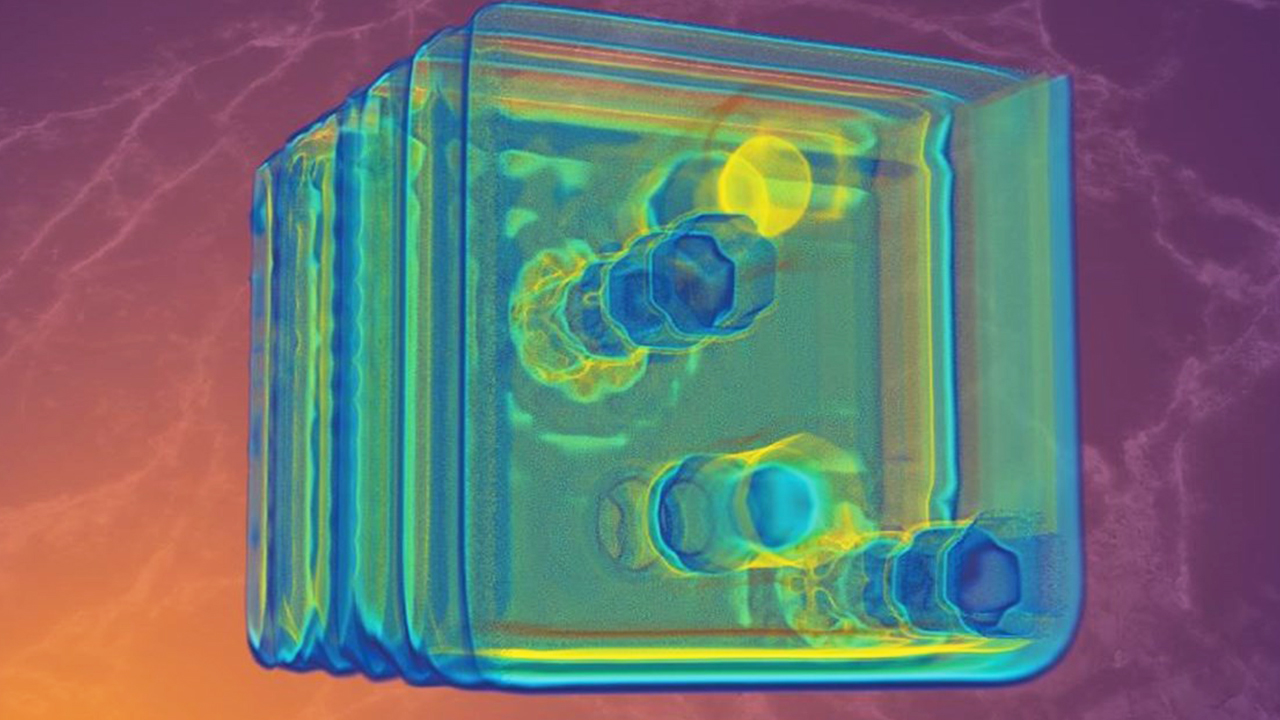
این تیم تحقیقاتی به رهبری گاتن بلوت، محقق مرکز اینسرم تصمیم گرفتند از روش اوریگامی DNA استفاده کنند. این امر امکان مونتاژ نانوساختارهای سهبعدی را به شکل از پیش تعریف شده با استفاده از مولکول DNA به عنوان ماده ساختمانی فراهم میکند. طی ده سال گذشته، این روش باعث پیشرفتهای عمده در فناورینانو شده است.
این نیاز موجب شد تا این گروه تحقیقاتی نانو ربات متشکل از سه ساختار اوریگامی DNA طراحی کنند. از نظر اندازه این ربات به قدری کوچک است که با اندازه یک سلول انسانی سازگار است. برای اولین بار اعمال و کنترل نیرویی با قدرت تفکیک ۱ پیکونیوتن، اعمال و کنترل میشود. این اولین باری است که یک شیء مبتنی بر DNA ساخته شده توسط انسان میتواند نیرویی با این دقت اعمال کند.
این تیم با جفت کردن ربات با مولکولی که یک گیرنده مکانیکی را تشخیص میدهد، شروع کردند. این امر باعث شد تا ربات را به سمت برخی از سلولهای خود هدایت کنیم و به طور خاص نیروها را به گیرندههای مکانیکی هدفمندی که روی سطح سلولها قرار دارند اعمال کنیم تا آنها را فعال کنیم.
چنین ابزاری برای تحقیقات پایه بسیار ارزشمند است، زیرا میتوان از آن برای درک بهتر مکانیسمهای مولکولی درگیر در حساسیت مکانیکی سلول و کشف گیرندههای سلولی جدید حساس به نیروهای مکانیکی استفاده کرد. به لطف این ربات، دانشمندان همچنین میتوانند با دقت بیشتری مطالعه کنند که در چه لحظهای هنگام اعمال نیرو، مسیرهای سیگنال کلیدی برای بسیاری از فرآیندهای زیستی و پاتولوژیکی در سطح سلول فعال میشوند.
طراحی رباتی که امکان استفاده در شرایط آزمایشگاهی و درون تنی نیروهای پیکونیوتون را فراهم میکند، تقاضای فزاینده در جامعه علمی را برآورده کرده و نشاندهنده یک پیشرفت فناورانه بزرگ است. با این حال، زیستسازگاری ربات را میتوان یک مزیت برای کاربردهای درونتنی در نظر گرفت.
بنابراین گام بعدی محققان بررسی چگونگی اصلاح سطح ربات به گونهای است که حساسیت کمتری نسبت به آنزیمها داشته باشد.